DJI Matrice 4E – co nowego w świecie „dronowej” fotogrametrii

Ostatni tydzień wraz z moimi współpracownikami i klientami spędziłem na poddawaniu rzetelnym testom nowości od DJI Enterprise, jaką niewątpliwie jest Matrice 4E. Wybaczcie, że na tę „recenzję” musieliście chwilę poczekać, ale moim zdaniem nasi Klienci zasługują na więcej niż suche fakty ze specyfikacji technicznej, które w zasadzie każdy może znaleźć na oficjalnej stronie produktowej.
Redagując ten tekst, zależało mi na przekazaniu kluczowych informacji, z którymi powinien zapoznać się każdy, kto zastanawia się nad zakupem Matrice 4E. Dlatego potrzebowaliśmy chwili czasu, aby móc rzetelnie przetestować innowacyjne funkcje tego modelu i wyrobić sobie na ich temat własną opinię.
Mavic czy Matrice, czyli jak jest z tymi nazwami?
DJI odeszło, a właściwie wróciło (ciekawe na jak długo), do nazywania modeli z gamy produktowej DJI Enterprise – Matrice’ami, a modeli z klasy DJI Consumer – Mavic’ami. Choć Matrice 4E jest bliżej pod względem budowy i rozmiarów do Mavica 3 Enterprise niż do Matrice 300/350 to w świadomości niektórych osób zakodowane jest, że seria Matrice to duże drony.
Wracając do nazewnictwa, moim osobistym zdaniem jest to uporządkowanie nazw produktowych po bałaganie, jaki wniósł Mavic 3 Enterprise do nazewnictwa modeli DJI Enterprise. Tak więc od dziś nowe drony konsumenckie są Mavic’ami (z wyjątkiem M3E – który zostaje w ciągłej sprzedaży), a drony „profesjonalne” – Matrice’ami.




Jakie zmiany w kamerze w porównaniu do Mavic 3 Enterprise?
Skoro kwestię nazwy mamy za sobą, przejdźmy do konkretów, czyli porównania Matrice 4E do swojego poprzednika. Jeśli chodzi o sensory to mamy łącznie dwa teleobiektywy - czyli o jeden teleobiektyw więcej niż w poprzedniku oraz dalmierz laserowy, którego brak w M3E. Jednak to, co nas najbardziej interesuje z fotogrametrycznego punktu widzenia, to kamera szerokokątna RGB.
Co do rozmiaru matrycy, rozdzielczość i rodzaju migawki – na papierze parametry pozostały bez zmian, czyli została zastosowana matryca o rozmiarze 4/3 cala, rozdzielczości 20 MP i mechaniczna migawka. Z istotnych różnic został skrócony interwał wykonywania zdjęć z 0,7 sekundy do 0,5 sekundy, co pozwala na wykonywanie nalotu z większą prędkością przy zachowaniu tego samego pokrycia podłużnego zdjęć.
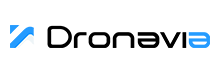
Ponadto obiektyw ma zredukowaną dystorsję (Distortion Correction 2.0), a właściwie rzecz ujmując, każdy obiektyw szerokokątny jest skalibrowany przed opuszczeniem fabryki. Precyzyjna redukcja dystorsji ma być na tyle dokładna, że resztkowe zniekształcenia (tzw. residual) nie powinny być większe niż 2 piksele.
Odniosłem wrażenie, że producenci programów fotogrametrycznych jeszcze „uczą się” tego sensora i musi minąć jeszcze chwila, aby w pełni wykorzystać jego potencjał. Ważne, że aby wykorzystać wyznaczone parametry dystorsji radialnej do wyrównania, powinniśmy wykonywać zdjęcia z wyłączoną korektą dystorsji (dewarping).
Tutaj stawiam kropkę, ponieważ aby coś więcej konstruktywnego napisać na temat kalibracji kamery, potrzebuję jeszcze pozyskać i przetworzyć kilka zestawów danych, aby wyrazić swoją opinię na ten temat.
W skrócie, jeśli chodzi o sensor – rozdzielczość ta sama, a zmiany to skrócony interwał wykonywania zdjęć oraz obiektyw ze znacznie zredukowaną dystorsją.
Zmiany czasu lotu, wagi i pojemności akumulatorów
Producent deklaruje maksymalny czas lotu od 46 do 49 minut w zależności od rodzaju śmigieł jakie zastosujemy (low-noise lub standard). Maksymalny czas zawisu wynosi odpowiednio 39 minut dla śmigieł low-noise lub 42 minuty dla standardowych śmigieł. Mavic 3 Enterprise może latać do 45 minut i być w bezruchu do 38 minut. Więc jeśli chodzi o czas lotu, oba modele wyglądają bardzo podobnie. Osobiście też nie zauważyłem znaczących zmian w czasie lotu pomiędzy nimi. Trzeba mieć świadomość, że producent powyższe wartości podaje w warunkach laboratoryjnych, przy rozładowaniu akumulatora do 0%, a nikt z pilotów dronów o zdrowych zmysłach nie wykonuje lotów w taki sposób. Wyjątek stanowi lot z prędkością sięgającą 21 m/s – podczas testów zauważyliśmy, że procenty naładowania akumulatora spadają w mgnieniu oka.
Jak już jesteśmy przy akumulatorach, to ich pojemność wzrosła z 5 000 mAh na 6741 mAh oraz zastosowano inny typ ogniwa, czyli akumulatory litowo-jonowe (Li-ion) zamiast litowo-polimerowych (Li-Po). Zauważyłem również znaczący wzrost czasu ładowania akumulatora – o co najmniej 30%. Dodatkowo Hub do ładowania, wyposażony jest w dwa tryby ładowania, zwykły do 100% oraz tryb szybkiego ładowania do 90%, co pozwala na szybsze naładowanie akumulatorów w terenie w nagłych sytuacjach.

Aparatura sterująca
W zestawie z dronem dostajemy aparaturę sterującą – DJI RC Plus 2, która rozmiarami przypomina aparaturę z M350, więc nie spodoba się to użytkownikom Mavica, którzy doceniali kompaktowość i wagę aparatury poprzednika. Z kolei będzie to atut dla osób, dla których przekątna ekranu w Mavicu była za mała, gdyż urosła ona z 5 do 7 cali. No niestety, w tej kwestii nigdy nie trafimy w gusta wszystkich odbiorców. Dużym atutem jest możliwość wymiany zewnętrznego akumulatora i tym samym przedłużenie czasu jego pracy. W przypadku całodziennych lotów Mavic’iem, klienci często korzystali z zewnętrznych powerbanków. Od dziś dobrze znane akumulatory o oznaczeniu modelowym WB37 mogą wrócić do łask i być znów wykorzystywane w pracy.
Co w zestawie i jakie akcesoria alternatywne?
Oprócz wspomnianej aparatury RC producent do zestawu dołącza ładowarkę, hub do ładowania, niezbędne okablowanie, zapasowe komplety śmigieł oraz jeden akumulator. Jako dodatkowe akcesorium można zakupić głośnik (AS1 Speaker), oświetlenie (AL1 Spotlight) oraz modem 4G (Cellular Dongle 2). Ciekawostką jest to, że montaż głośnika nie wyklucza montażu oświetlenia – można zamontować je jednocześnie. O ile głośnik i oświetlenie będą przydatne bardziej dla służb niż dla osób związanych z fotogrametrią, to modemy 4G/LTE mogą Was zainteresować, więc kilka słów jak one działają i do czego służą.
Jeden z modemów możemy zamontować w aparaturze sterującej, a drugi w obudowie drona. Pierwszy z nich pozwala na połączenie się z internetem bez konieczności udostępniania go za pomocą routera Wi-Fi np. ze smartphona. Dostęp do internetu w aparaturze służy do połączenia się z siecią poprawek RTK/RTN (np. TPI NETpro lub ASG-EUPOS). Ponadto umożliwia pobieranie podkładów satelitarnych i modeli wysokościowych. Może on również posłużyć do połączenia się z dronem drogą internetową, o ile drugi z modemów jest w dronie.
Tym samym płynnie przeszliśmy do drugiego modemu, który umożliwia „przedłużenie” zasięgu drona. Jego działanie jest proste – kiedy tracimy połączenie radiowe pomiędzy aparaturą a dronem lub jest ono niskiej jakości, system automatycznie przełącza na połączenie po sieci GSM. Więcej o tym rozwiązaniu pisałem w artykule o modemach. Oczywiście oba modemy muszą być wyposażone w kartę SIM z aktywnym dostępem do internetu.
Nowością jest również fakt, że w cenie drona zostajemy objęci rocznym pakietem DJI Care Enterprise Plus. Pozwala ona na bezpłatną wymianę drona po ewentualnym dzwonie. Przypominam, że przy zakupie M3E w standardzie jest DJI Care Enterprise Basic, gdzie po każdej kraksie musimy dokonać niewielkiej opłaty, aby dostać odnowionego drona.
W przypadku zakupu M4E, cenie klient otrzymuje również roczną licencję na oprogramowanie DJI Terra, podczas gdy użytkownicy M3E otrzymują dostęp tylko na 3 miesiące. Pamiętać należy, że jest ona ograniczona jedynie do przetwarzania zdjęć z Matrice 4E.

Nowe sposoby realizacji lotów fotogrametrycznych
Lot z prędkością 21 m/s
Planowanie
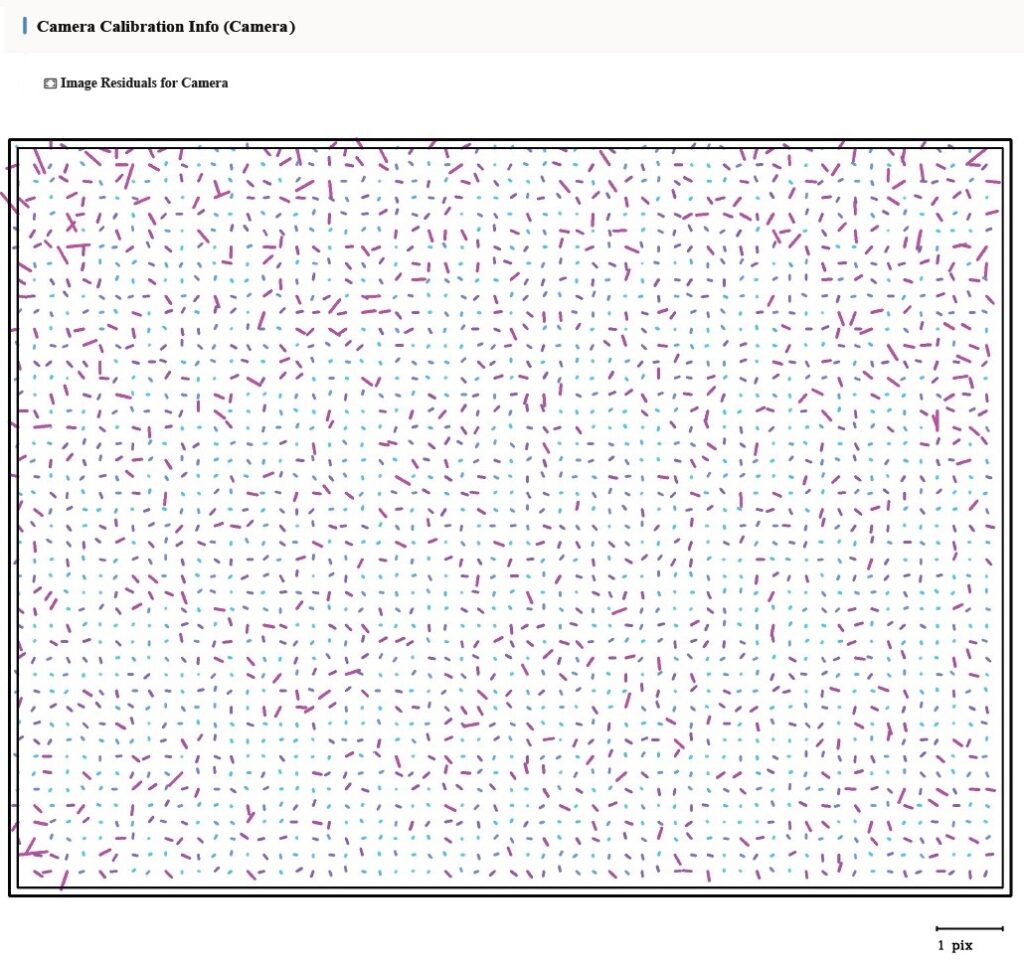
Na temat samego planowania lotu z prędkością 21 m/s nie ma się co rozpisywać. Zaznaczamy obszar nalotu, wybieramy wysokość nalotu i suwak odpowiadający za prędkość lotu przesuwamy na max. w prawo. Jeśli z góry ogranicza nas inna wartość prędkości, zapewne ustawiliśmy zbyt niską wysokość lotu lub/i za duże pokrycie podłużne zdjęć. Na tym etapie chciałbym porównać czas potrzebny na wykonanie nalotu dla kilku powierzchni.
Zauważyć można, że w przypadku małych powierzchni wartość czasu, którą zyskujemy, jest niewielka. Przy dużych powierzchniach wymiar czasowy, który „zaoszczędzamy”, jest już znaczący. Zauważyliśmy jednak, że podczas wykonywania lotów z pełną prędkością – drenaż baterii jest znaczący. Ciekaw jestem, jak będzie z żywotnością akumulatorów, kiedy notorycznie będzie ona poddawana pracy w takich warunkach.
Realizacja
W przypadku lotu z tak wysoką prędkością konieczne będzie ustawienie odpowiedniego krótkiego czasu naświetlania. Kiedy o to nie zadbamy, to przy słabych warunkach oświetleniowych, występuje duże ryzyko, że zdjęcia będą niewyraźne, co negatywnie wpłynie na jakość końcowych opracowań fotogrametrycznych.
Wynik
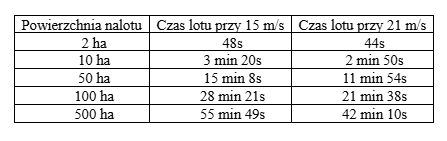
Wykonanie nalotu na obszarze 29 ha zajęło około 8 minut! W tym czasie wykonano 300 zdjęć z pokryciem podłużnym 70% i poprzecznym 75%. Czas naświetlania 1/1000. Studenci studiów podyplomowych dostarczyli mi współrzędne osnowy fotogrametrycznej, co pozwoliło mi na wykonanie analizy dokładności.
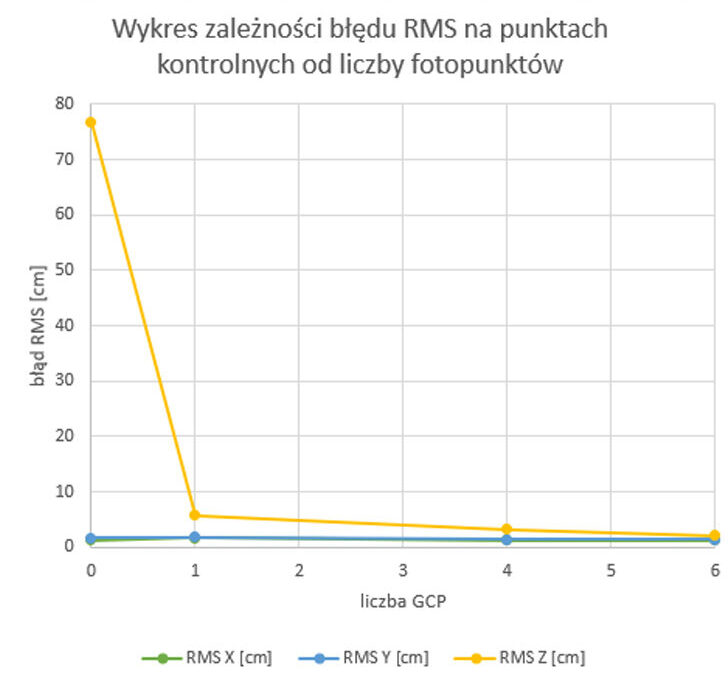
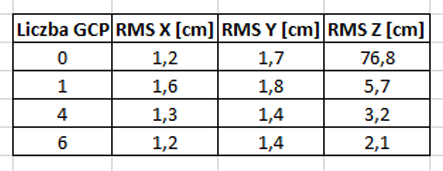
Podczas wyrównania z zerową liczbą fotopunktów, błąd na punktach kontrolnych wyniósł +/– 1,2 cm w osi X i +/– 1,7 cm w osi Y, natomiast po osi Z zaobserwowałem stały błąd wysokościowy wynoszący aż +76 cm.
Włączenie jednego fotopunktu do wyrównania (a właściwie rzecz nazywając – „do dociągnięcia”) nie miał znaczącego wpływu na dokładność XY, natomiast w znaczący sposób zredukował stałe przesunięcie wysokościowe i wyniosło ono +/– 6 cm.
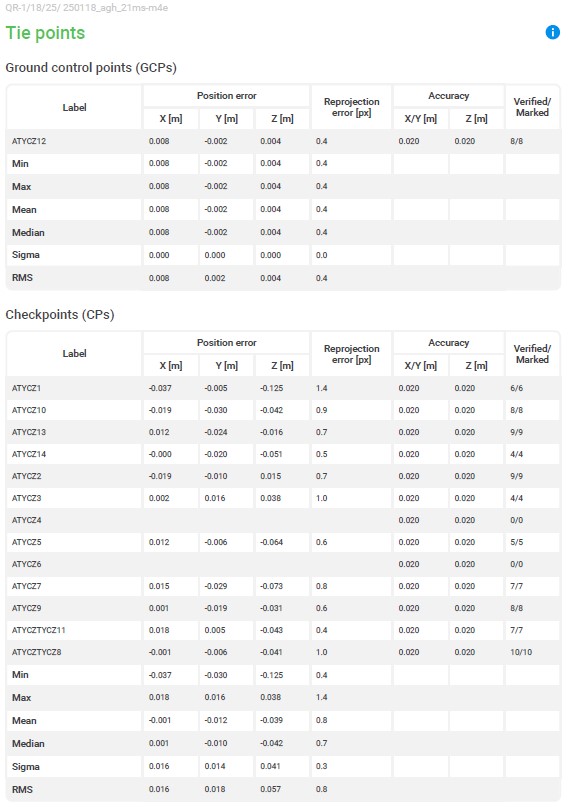
Wyrównanie na 4 fotopunkty rozmieszczone w narożnikach obszaru opracowania dało następujące rezultaty: RMS XY: nadal +/– 1,5 cm, błąd Z +/– 3,2 cm.
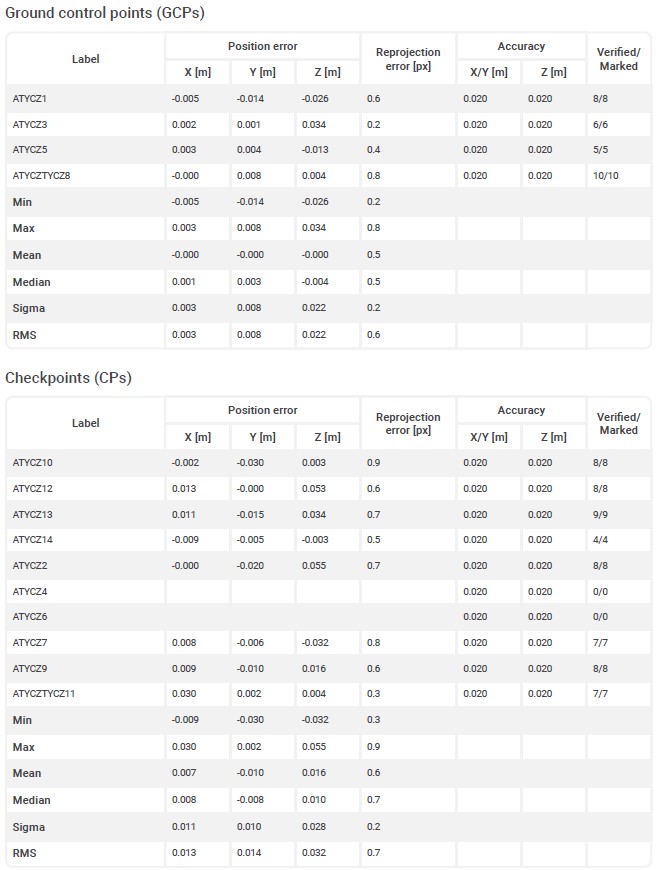
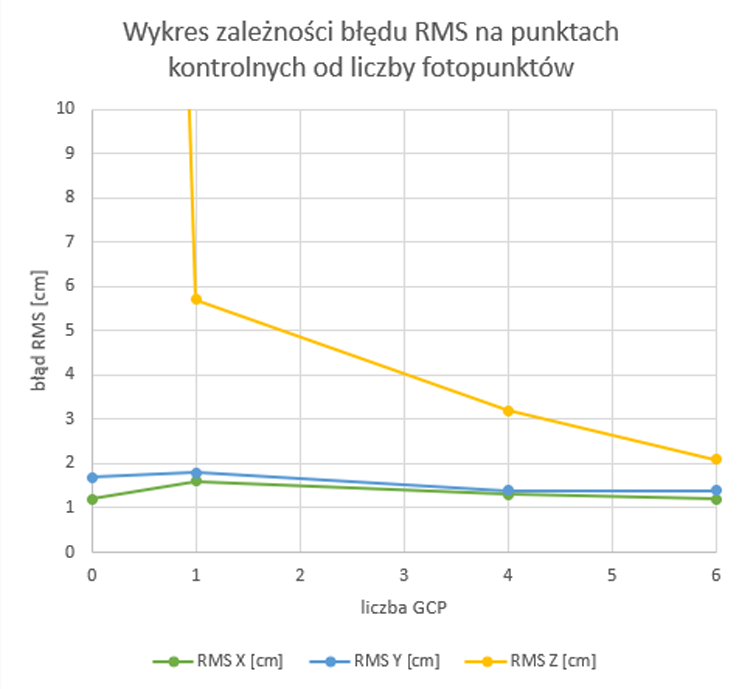
Wyrównanie oraz ortofotomozaikę wykonano w Pix4Dmatic (włączona opcja deghosting, która automatycznie usuwa większość poruszających się obiektów). Poniżej wynikowa ortofotomozaika oraz szczegółowy wykres zależności błędów na punktach kontrolnych w zależności od liczby użytych fotopunktów.
Dla przejrzystości wykresu - ograniczyłem osi pionowej do 10 cm.
Proszę nie zwracać uwagi na słabej jakości orto przy wysokich budynkach, to norma, że z takim pokryciem i lotem na 75 m AGL wyjdą artefakty (i dziury w chmurze punktów) na pionowych ścianach 40 metrowych budynków 😉
Zastosowanie
Lot z tak wysoką prędkością znajdzie zastosowanie przy wielkoobszarowych opracowaniach. Natomiast trzeba pamiętać o prawidłowym ustawieniu ekspozycji zdjęć oraz o skróconym czasie pracy na akumulatorze. Na chmurze punktów mogą pojawiać się widoczne „dziury” na elewacjach budynków oraz na innych wysokich obiektach.
Smart Oblique – wersja lewo-nadir-prawo
Planowanie
Aby podczas akwizycji zdjęć pionowych pozyskiwać zdjęcia ukośne w lewo i prawo należy uruchomić opcje „Smart Oblique” podczas planowania misji w trybie „Ortho Collection”. Po jego aktywacji szeregi nalotów automatycznie rozsuwają się szerzej. Minimalne pokrycie poprzeczne, jakie pozwala ustawić aplikacja to 45%, a maksymalna prędkość, z jaką możemy wykonywać lot w tym trybie zależy od ustawień pokrycia podłużnego zdjęć i wysokości nalotu. Rekomendowałbym jednak na ustawieniu standardowego pokrycia 65-70%, ponieważ przy włączeniu trybu smart oblique i tak liczba szeregów zmniejsza się o połowę.
Realizacja
Myślę, że realizacji nalotu nie przedstawi lepiej żaden opis niż przechwycony ekran z aparatury sterującej. Proszę zwrócić uwagę jak daleko „sięga” zasięg kamery, co pozwala na poszerzenia pasa zobrazowania.
Wynik
Przy ustawieniu pokrycia poprzecznego na minimum, czyli 45%, z wysokości 95 m AGL możemy uzyskać wynikowy piksel terenowy GSD na ortofotomozaice o wartości około 3,5 cm i szerokość skutecznego zobrazowania pojedynczego pasa ponad 250 m. To świetny wynik pozwalający na osiągnięcie jeszcze wyższej wydajności przy wykorzystaniu dronów w fotogrametrii. Należy jednak pamiętać o tym, że dołożenie zdjęć ukośnych do zbioru danych, zwiększa piksel terenowy w porównaniu do zestawu zdjęć samych zdjęć pionowych z tej samej wysokości.
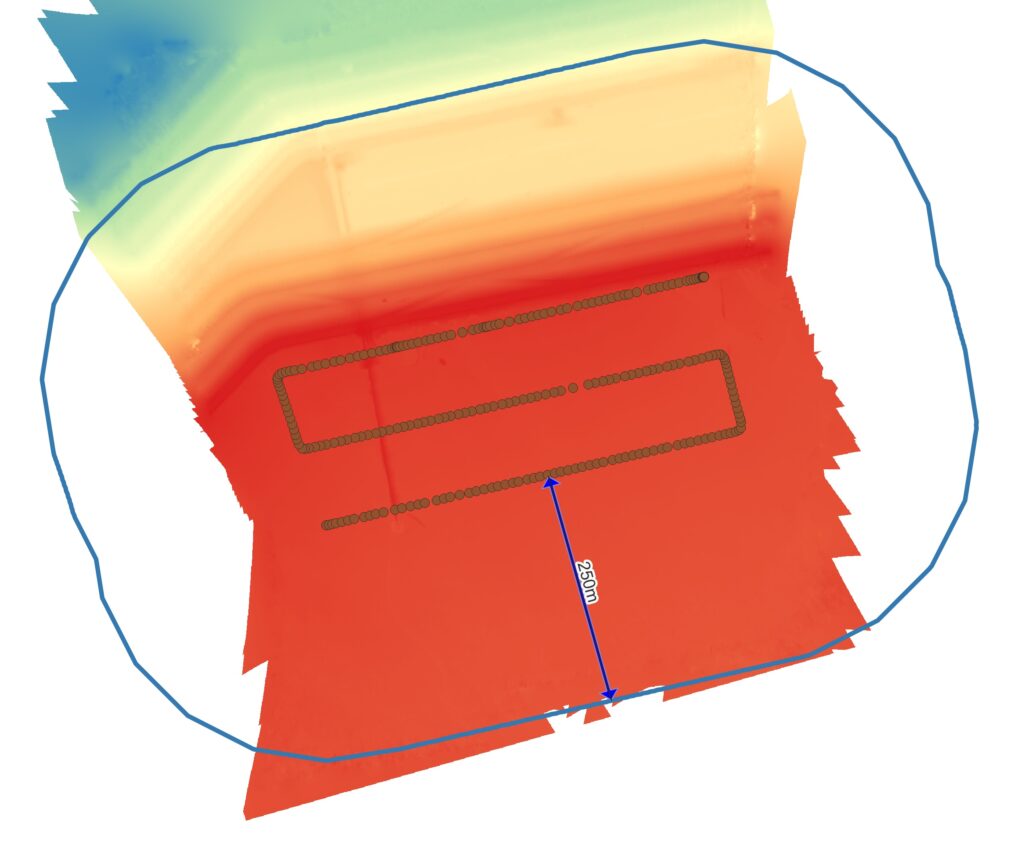
Zdjęcie prezentuje model wysokościowy z trzech szeregów z wysokości 95 metrów i pokryciu poprzecznemu 65%. Niebieska linia oznacza bufor 250 metrów od skrajnych szeregów.
Z pewnością należy spodziewać się większych błędów wysokościowych na obszarach, gdzie punkty tworzące model pochodzą tylko ze zdjęć z jednego kierunku. Osobiście taką metodę stosowałbym jedynie do pomiarów, gdzie nie jest wymagana wysoka dokładność.
Zastosowanie
Zastosowanie tego trybu pozwala na znaczne zwiększenie wydajności drona pod względem zobrazowania dużej powierzchni. Należy pamiętać o tym, że rozdzielczość ortofotomozaiki będzie niższa niż w przypadku zdjęć nadirowych z tej samej wysokości. Ponadto w przypadku ustawienia zbyt niskiego pokrycia poprzecznego zdjęć mogą pojawiać się artefakty na krawędziach wysokich obiektów.
Smart Oblique – wersja ze zdjęciami w 5 kierunkach
Planowanie
Aby zaplanować nalot, podczas którego zostaną pozyskiwane zdjęcia ukośne w 5 kierunkach, należy wybrać opcje „Oblique Mapping” i pozostawić włączoną opcję „Smart Oblique”. W przeciwieństwie do swojego poprzednika (Mavic’a 3 Enterprise) – Matrice 4E potrafi zmieniać kąt pochylenia kamery na boki, co pozwala na wykonanie zdjęć w pięciu kierunkach podczas pojedynczego przelotu. Mavic 3 Enterprise potrzebował na to wykonania dwóch osobnych przelotów, podczas pierwszego wykonuje zdjęcia przód-dół-tył, a podczas drugiego (skręconego o 90 stopni do pierwszego) przód-tył.
Realizacja
Pracę kamery Matrice 4E przedstawia poniższe wideo. Ciekawostką jest to, że przybliżony zakres zdjęcia widać również na planie nalotu z podkładem satelitarnym.
Wadą tego rozwiązania jest to, że podczas ciągłego wpatrywania się w ekran aparatury i uważnego śledzenia ruchu kamery może zakręcić się w głowie. Natomiast pomimo niezwykle dynamicznych ruchów, zdjęcia wychodzą ostre.
Wynik
Przeprowadzenie nalotu z 70 m AGL pozwoliło zrealizować pomiar narożników wybranych budynków. W porównaniu do współrzędnych naroży pobranych z geoportalu błąd nie przekraczał 4 cm, co świadczy o koincydencyjnym pomiarze geodety wykonującego pomiar do mojego pomiaru wykonanego na zdjęciach.
Jeżeli chodzi o jakość modelu, to przy dużym przybliżeniu zaobserwować można liczne błędy w szczególności nad zadaszeniami wystającymi poza obrys budynku. Natomiast do wykonania wysokorozdzielczego modelu pojedynczego obiektu służy inna misja, którą opisano w kolejnym podrozdziale.
Zastosowanie
DJI ponownie stanął na wysokości zadania i przybliżył wydajność kompaktowego drona do duetu Matrice 300/350 & Zenmuse P1. Oczywiście, aby osiągnąć podobny piksel terenowy co P1 z obiektywem o długości ogniskowej 35 mm ze 120 m AGL, musimy latać na wysokości około 70 metrów. Piksel terenowy, który pozyskujemy podczas lotów na wymienionych wyżej wysokościach, pozwala na przeprowadzanie pomiaru na zdjęciach narożników budynków do celów aktualizacji EGiB z wymaganą dokładnością. Oczywiście nadal ciężko porównywać wydajność kamer 5-obiektywowych oraz P1 do wydajności, którą oferują nam kompaktowe drony typu M3E/M4E, natomiast trzeba powiedzieć sobie jasno – jest do duży krok naprzód. Mniejsze drony sprawdzą się przy mniejszych powierzchniach np. pojedyncze wioski. Natomiast do pomiaru całych obrębów – nadal użyłbym Matrice 300/350 z odpowiednim sensorem.
Smart capture 3D
Planowanie
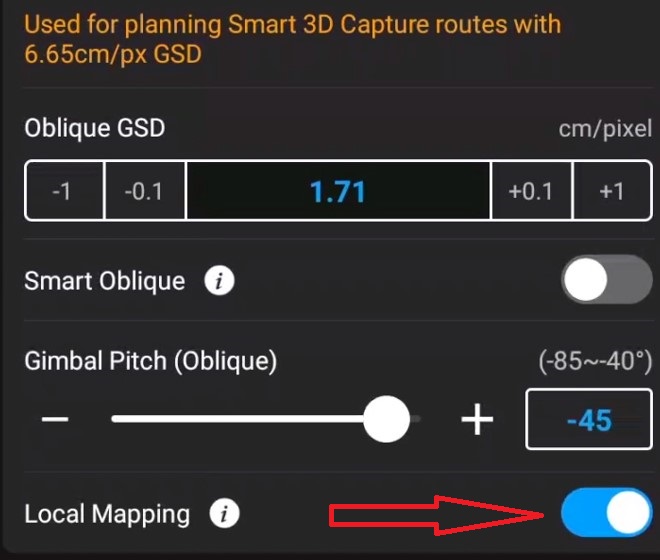
Planowanie misji, podczas której uzyskamy szczegółowy model 3D obiektu, musimy podzielić na dwa etapy. Pierwsza misja posłuży na pozyskanie zdjęć, aby zgrubnie odwzorować kształt obiektu. Następnie chmura punktów, która tworzy się na aparaturze sterującej, posłuży nam na zaplanowanie właściwego nalotu pod pozyskanie zdjęć z bliższej odległości od obiektu. Wbrew pozorom, moc obliczeniowa aparatury sterującej wcale nie jest niska i wygenerowanie chmury punktów ze 100 zdjęć nie trwało dłużej niż dwie minuty. Aby chmura punktów została wygenerowana na aparaturze konieczne jest wybranie opcji „Local mapping”, którą możemy zaznaczyć podczas planowania każdego z dostępnych trybów misji.
Kiedy pasek postępu odpowiedzialny za przetwarzanie modelu dojdzie do końca, możemy przejść do planowania docelowej misji. Na początku definiujemy obszar, a następnie bryłę. Nie należy zapominać o ustaleniu odpowiedniej wysokości minimalnej i maksymalnej bryły.
Kolejnym krokiem będzie określenie odległości ścieżki, po której będzie poruszał się dron od obiektu. Możemy również określić pozostałe parametry takie jak np. pokrycie poprzeczne i podłużne zdjęć. Podczas realizacji poniższego nalotu poza ustawieniem odległości na 4 metry, pozostałe parametry pozostawiono na domyślnych ustawieniach.
Realizacja
Poniżej wideo przedstawiające nagranie ekranu aparatury sterującej. Zwróćcie uwagę, że transmitowany obraz można przełączać pomiędzy widokami z kamery, ścieżką na chmurze punktów a widokiem z czujników wizyjnych, co jest niezwykle przydatne przy monitorowaniu, czy dron nie spotka się z przeszkodą, która nie została odwzorowana na chmurze punktów policzonej na aparaturze drona. Trzeba uważać na pojedyncze gałęzie i linie napowietrzne, które nie zostały odwzorowane na chmurze.
Byłem pod bardzo dużym wrażeniem precyzji lotu drona, ponieważ pomimo skomplikowanej bryły, aplikacja nie pozostawiła wielu nieobfotografowanych miejsc na obiekcie, do których trzeba było manualnie podlatywać dronem w celu wykonania dodatkowych zdjęć. Jedyne co wykonałem to dwa okrążenia wokół obiektu, trzymając drona w ręku przy włączonym interwale wykonywania zdjęć co 2 sekundy. Tak było bezpieczniej, szybciej i dokładniej. Dzięki temu zachowano tę samą rozdzielczość tekstury na całej wysokości obiektu.
Wynik
Model mówi sam za siebie. Nieskromnie powiem, że to chyba najlepiej odwzorowany obiekt w całej mojej dronowej karierze. Zasmucające jednak jest to, że nawet laik z pomocą odpowiedniego oprogramowania może osiągnąć podobne efekty. Na nic się zdała moja wiedza o fotogrametrii i umiejętności manualne latania dronem, ponieważ poza ustawieniem ekspozycji zdjęć, zaplanowaniem misji, ominięciem kilku przeszkód i wrzuceniem zdjęć do oprogramowania (w tym przypadku Bentley iTwin Capture Modeler) – nie musiałem zrobić nic. Model 3D nie został poddany jakimkolwiek ingerencjom.
Całość pozyskania tego modelu przedstawia następujące wideo.
Dzięki Grześku za przeliczenie danych i ich publikacje!
Klikając w zdjęcie poniżej, przeniesie Was na model(polecam oglądać na pełnym ekranie – jest wygodniej) kościoła NMP we Starczy:
Natomiast, poniższe zdjęcie przeniesie Was na model model wieży ciśnień we wrocławskich Karłowicach:


Zastosowanie
Opcja ta będzie szczególnie przydatna i ułatwiająca pracę osobom, które wykorzystują bezzałogowce do wykonywania wysokorozdzielczych modeli 3D. Obiekty zabytkowe lub sakralne z wyraźnie zaznaczoną teksturą są wręcz stworzone do zamodelowania za pomocą tego narzędzia.
Brakującą funkcją w tym trybie jest zdefiniowanie obszarów „no fly zone”. Mogą one przydać się na etapie planowania misji do określenia miejsc, do których nasz dron ma „zakaz wstępu”. Na ten moment w pobliżu drzew lub napowietrznych przewodów cała uwaga pilota musi być skupiona na dronie i na manualnym omijaniu przeszkód.
Wykonywanie prostych pomiarów w locie
Realizacja
Nowością na pewno jest wykonywanie pomiarów za pomocą dalmierza laserowego, który pozwala na wykonywanie pomiarów w odległości do 1 800 metrów. Aby wykonać taki pomiar, należy włączyć funkcję dalmierza oraz z ekranu wybrać opcję „point measure”. Kiedy pomiar punktu zrobimy kilkukrotnie, aparatura pokaże nam współrzędne każdego z punktów w układzie geograficznym oraz odległości pomiędzy nimi.
Wynik
Pomiaru współrzędnych nie należy traktować jako pomiar spełniający geodezyjne standardy. Jest to spowodowane tym, że oprócz dalmierza, do określenia współrzędnych potrzebne jest dokładne określenie azymutu (heading’u) drona. Co jednak ciekawe, odległości pomiędzy współrzędnymi były dokładne do decymetrów, a współrzędne punkty względem siebie nie wykazywały dużych błędów (błąd do 15 cm). Punkty były skręcone o kąt wyznaczenia azymutu. Myślę, że opcja przydatna do wykonania zgrubnych pomiarów na placach budowy, kiedy widoczność pomiędzy dwoma punktami może być zakłócona przez liczne przeszkody.
Podsumowanie
W trosce o zbyt dużą objętość artykułu pozwoliłem sobie nie opisywać więcej nowych funkcji, które oferuje nowy Matrice 4E. Do ciekawych opcji należą funkcje wykorzystujące AI, które pozwalają na automatyczne zliczanie samochodów, ludzi oraz łodzi. Natomiast pomimo obszerności tego artykułu mam nadzieje, że drodzy Czytelnicy – dotarliście do jego końca i choć w najmniejszym stopniu potrafiłem przelać na Was moją ekscytację związaną z nowością w świecie fotogrametrii.
Jeśli chodzi o cenę, wynosi ona 16 900 zł netto. W przypadku zakupu tego modelu od TPI klient otrzymuje za 1 zł subskrypcje na 18 miesięcy lub 100 h na poprawki RTK/RTN z sieci TPI NETpro oraz wdrożenie, które może okazać się kluczowe, aby w pełni wykorzystać potencjał drona.
Jeśli szukasz narzędzia do zaawansowanych zastosowań fotogrametrycznych lub modelowania 3D, DJI Matrice 4E będzie odpowiednim wyborem. Jednak użytkownicy posiadający Mavic 3 Enterprise powinni dokładnie rozważyć, czy zmiany są na tyle istotne, by uzasadnić wymianę sprzętu. Dla tych, którzy dopiero zaczynają swoją przygodę z dronami profesjonalnymi, Matrice 4E może być przyszłościowym rozwiązaniem, które łączy zaawansowane technologie z wysoką jakością danych.
Należy pamiętać, że dron sam w sobie nie wykonuje opracowań fotogrametrycznych (z wyjątkiem chmury, która pomaga w zaplanowaniu misji Smart 3D) i konieczne jest przetworzenie zdjęć w oprogramowaniu fotogrametrycznym. W zależności od zadania, w tym artykule wykorzystano takie programy jak Pix4Dmatic, iTwin Capture Modeler, DJI Terra oraz 3Dsurvey. Każdy z nich pracuje nieco inaczej i ma swoje mocne strony. Aby z powyższej listy wybrać odpowiednie narzędzie dla Ciebie, odezwij się do swojego dronowego opiekuna od TPI.
W zależności od województwa będzie to:
- Dominika Pulikowska (wielkopolskie, lubuskie, zachodnio-pomorskie) - 721 262 060 - dpulikowska@tpi.com.pl
- Grzesiek Sylwerski (pomorskie, kujawsko-pomorskie, warmińsko-mazurskie) - 664 479 443 gsylwerski@tpi.com.pl
- Karol Rosiak (mazowieckie, łódzkie, lubelskie, podlaskie) - 722 204 590 - krosiak@tpi.com.pl
- Maciek Wywiał (dolnośląskie, opolskie, śląskie, małopolskie, podkarpackie, świętokrzyskie) - 600 367 548 - mwywial@tpi.com.pl
Kilka słów od autora
Mam nadzieję, że ten tekst zaciekawił Was i pozwolił rozwiać większość wątpliwości dotyczących DJI Matrice 4E. Na pozostałe, z przyjemnością odpowiedzą handlowcy TPI z działu UAV. Zachęcam również do śledzenia naszych mediów społecznościowych, w których na bieżąco staramy się opisywać nowinki technologiczne związane z technologiami pomiarowymi. W szczególności polecam obserwować wiadomości z działu UAV, ponieważ drony stale ewoluują, oferując coraz lepsze możliwości pomiarowe. Jeśli macie własne doświadczenia z wykorzystaniem bezzałogowych statków powietrznych w geodezji, chętnie poznam Wasze opinie i spostrzeżenia!