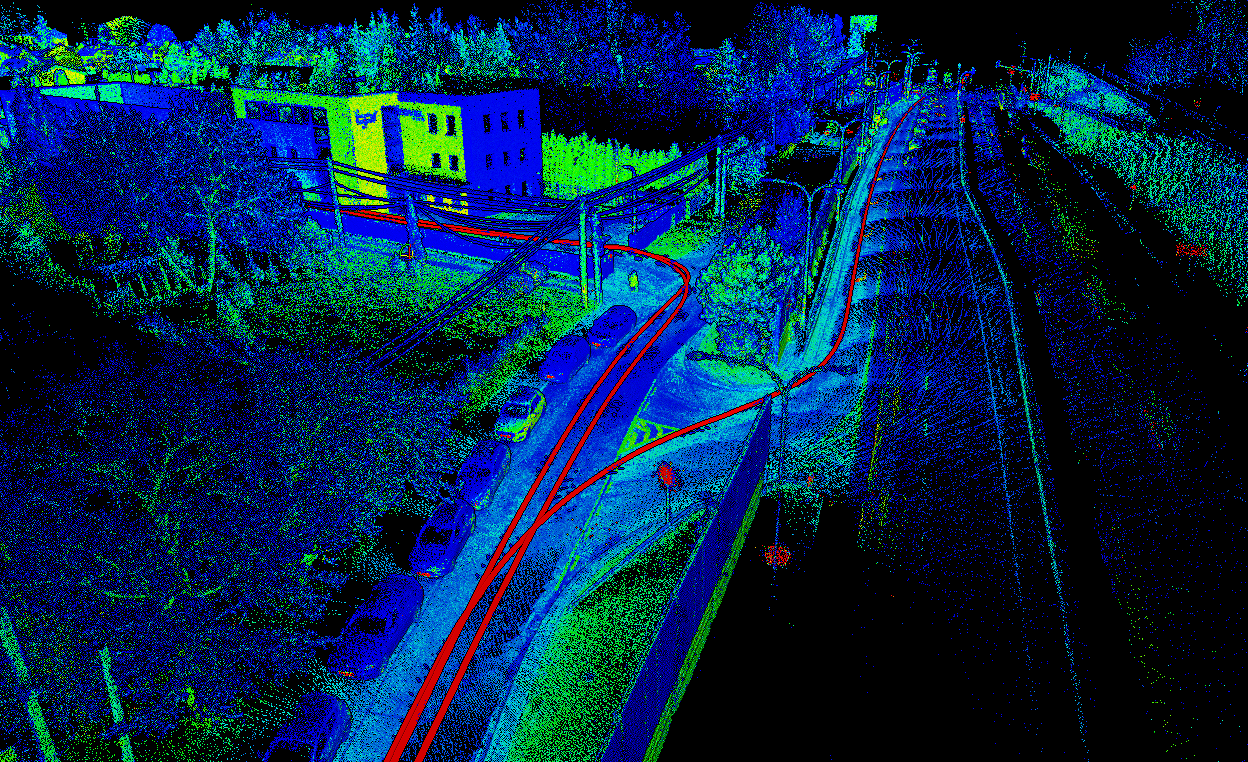
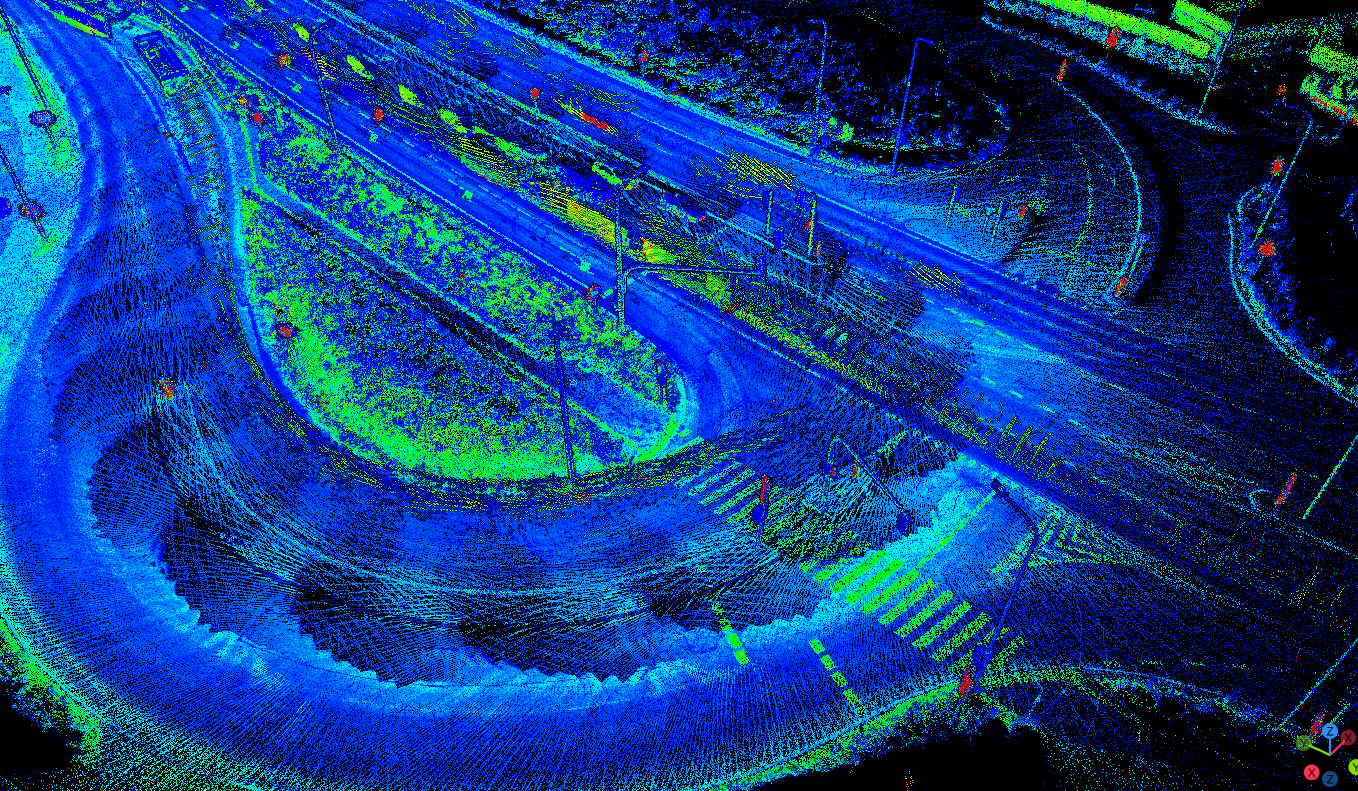
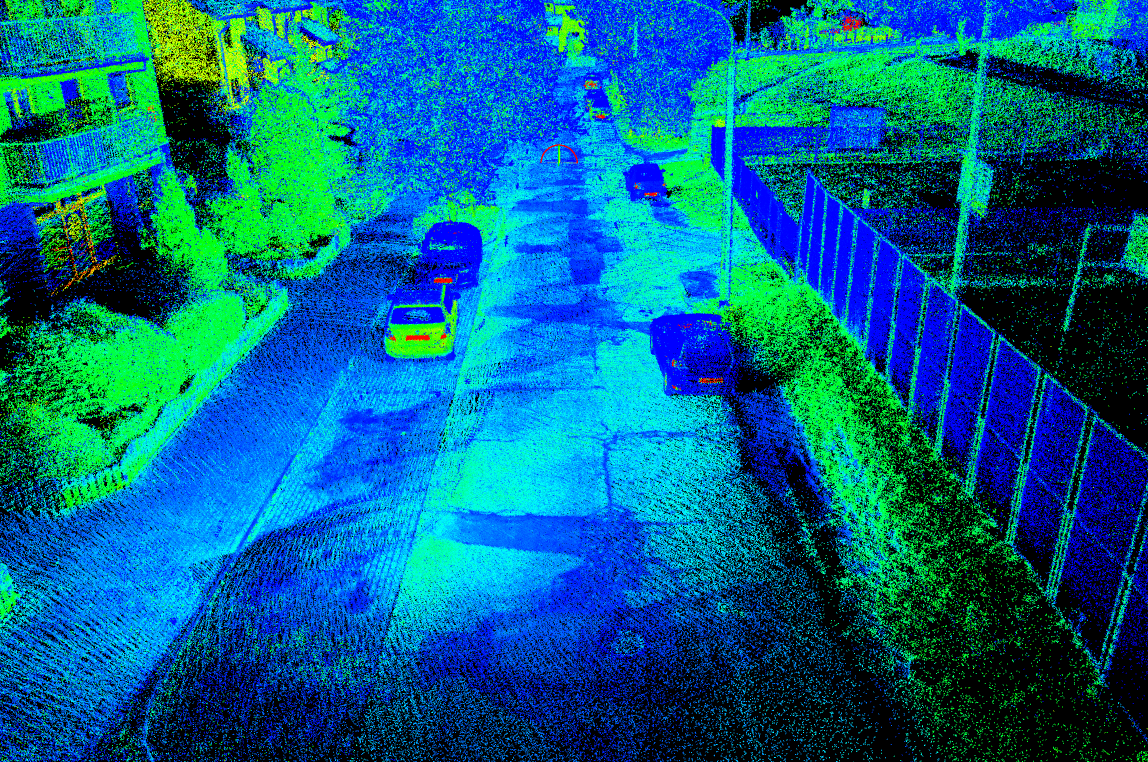
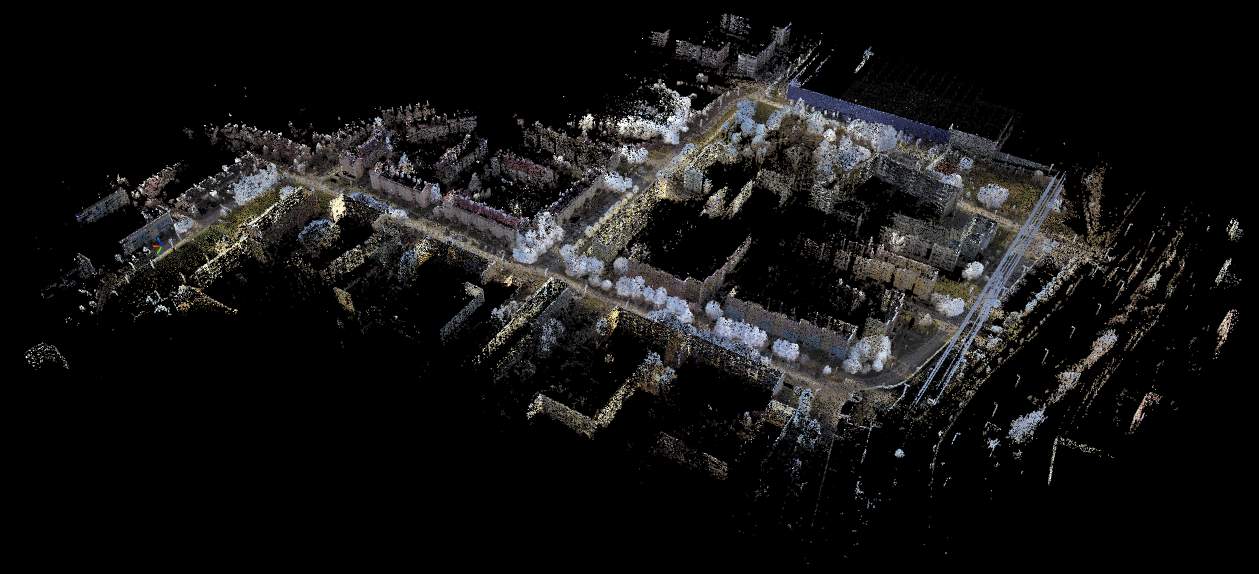
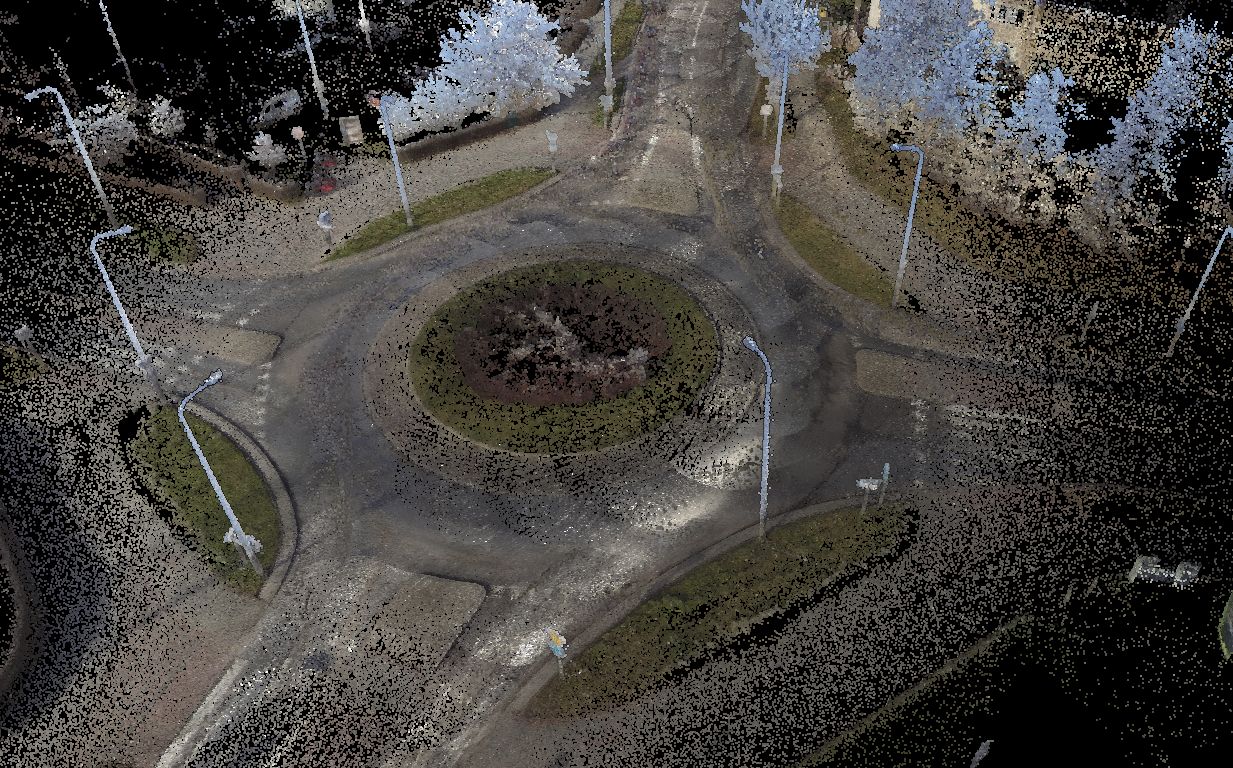
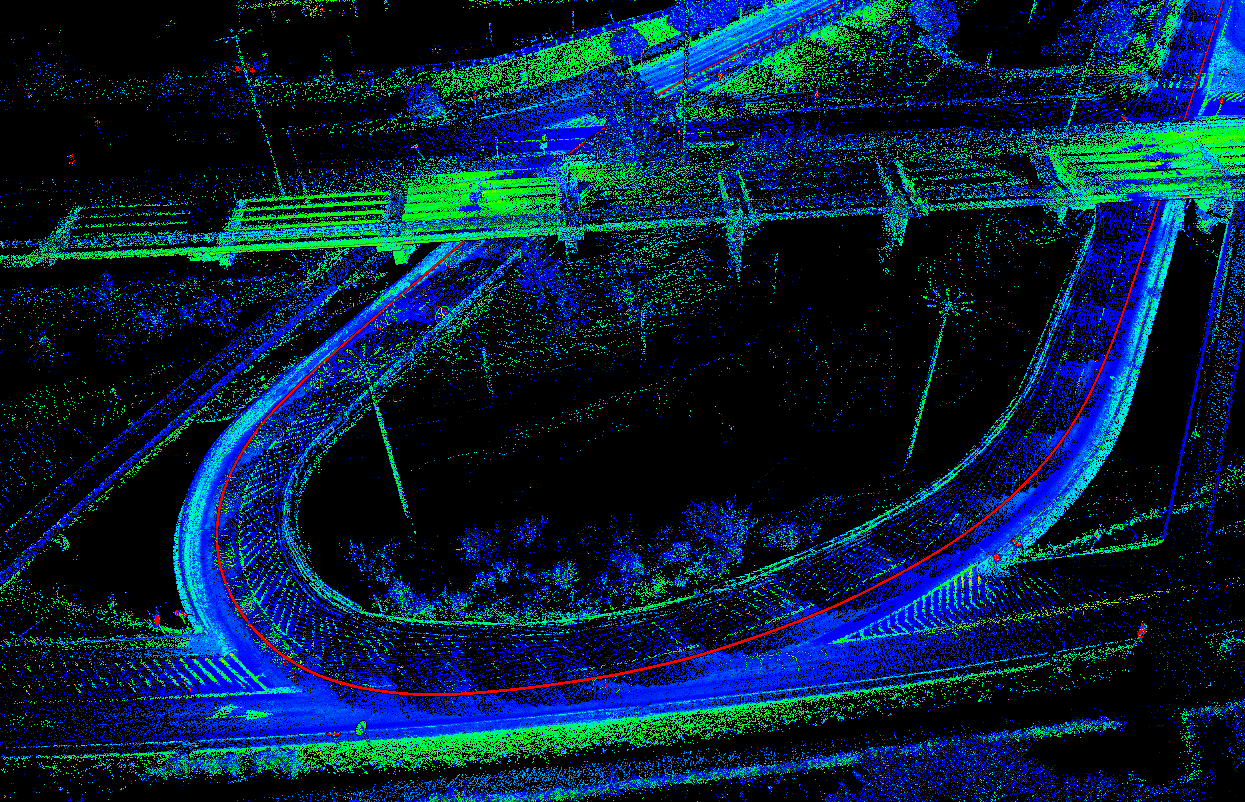
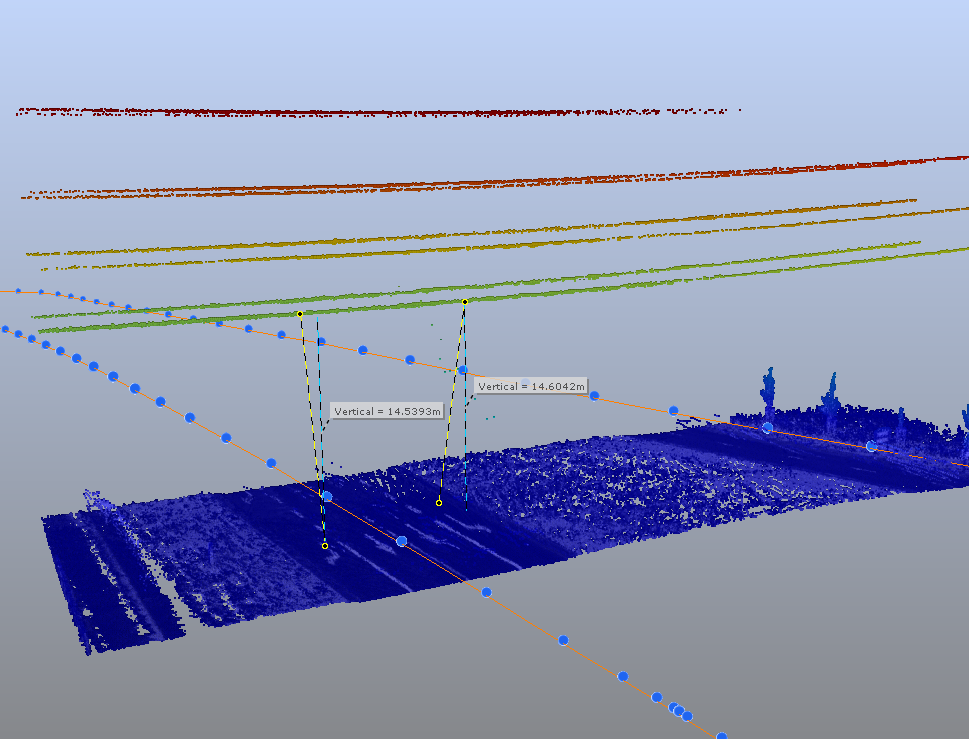
Skaner mobilny 3D Faro Orbis – zastosowanie skanera zamontowanego na samochodzie do planowania przejazdów transportów ponadnormatywnych

























 Karol Derejczyk
Karol Derejczyk
Inżynier skanowania 3D
WARSZAWA i POZNAŃ
 Bartłomiej Zdzieborski
Bartłomiej Zdzieborski
Kierownik produktu 3D
GDAŃSK
 Maja Łukasiewicz
Maja Łukasiewicz
Manager regionu
KRAKÓW I WROCŁAW
 Kamil Grabiec
Kamil Grabiec
Doradca techniczno-handlowy ds. 3D